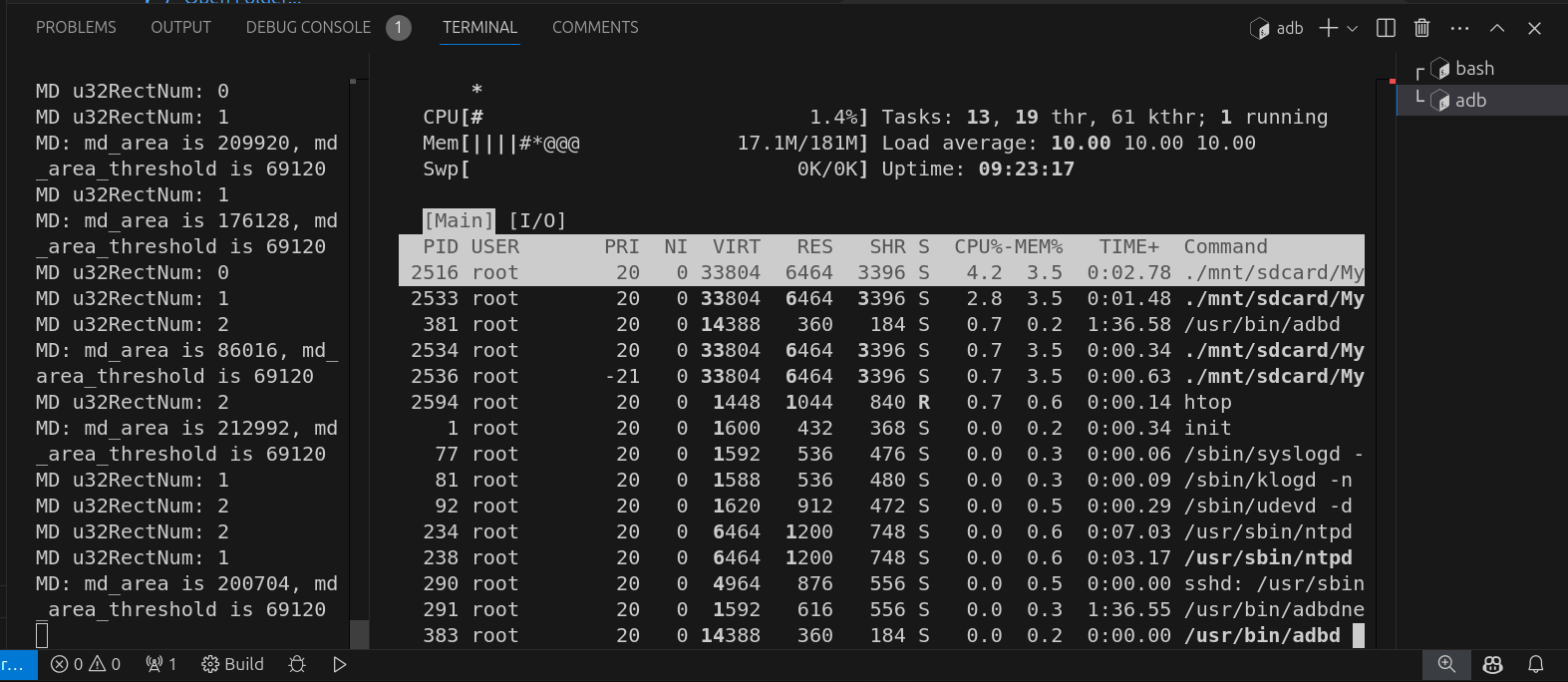
经过不懈努力,实现了单通道的的运动检测,参数不是很理想,导致结果很极端。
不过从性能来看,这次我们充分使用了npu加速,cpu占用很低而且温度也很低,适合长期跑着,验证了运动检测的可行性。
直接贴代码吧
#include <assert.h>
#include <errno.h>
#include <fcntl.h>
#include <pthread.h>
#include <signal.h>
#include <stdbool.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/poll.h>
#include <time.h>
#include <unistd.h>
#include <vector>
#include "sample_comm.h"
typedef struct _rkMpiCtx
{
SAMPLE_VI_CTX_S vi;
} SAMPLE_MPI_CTX_S;
RK_U64 TEST_COMM_GetNowUs()
{
struct timespec time = {0, 0};
clock_gettime(CLOCK_MONOTONIC, &time);
return (RK_U64)time.tv_sec * 1000000 + (RK_U64)time.tv_nsec / 1000; /* microseconds */
}
static MPP_CHN_S vi_chn, ivs_chn;
int md_area_threshold = 640 * 360 * 0.3;
int main(int argc, char *argv[])
{
system("RkLunch-stop.sh");
// config vi
RK_S32 s32Ret = RK_SUCCESS;
SAMPLE_MPI_CTX_S *ctx;
RK_U32 u32ViWidth = 640;
RK_U32 u32ViHeight = 360;
RK_CHAR *pOutPath = NULL;
RK_CHAR *pDeviceName = NULL;
RK_S32 s32CamId = 0;
RK_S32 s32ChnId = 1;
RK_S32 s32loopCnt = -1;
PIXEL_FORMAT_E PixelFormat = RK_FMT_RGB565;
COMPRESS_MODE_E CompressMode = COMPRESS_MODE_NONE;
rk_aiq_working_mode_t hdr_mode = RK_AIQ_WORKING_MODE_NORMAL;
ctx = (SAMPLE_MPI_CTX_S *)(malloc(sizeof(SAMPLE_MPI_CTX_S)));
memset(ctx, 0, sizeof(SAMPLE_MPI_CTX_S));
// init rkaiq
RK_BOOL multi_sensor = RK_FALSE;
const char *iq_dir = "/etc/iqfiles";
// hdr_mode = RK_AIQ_WORKING_MODE_ISP_HDR2;
SAMPLE_COMM_ISP_Init(0, hdr_mode, multi_sensor, iq_dir);
SAMPLE_COMM_ISP_Run(0);
// init mpi
RK_MPI_SYS_Init();
// Init VI
{
ctx->vi.u32Width = u32ViWidth;
ctx->vi.u32Height = u32ViHeight;
ctx->vi.s32DevId = s32CamId;
ctx->vi.u32PipeId = ctx->vi.s32DevId;
ctx->vi.s32ChnId = s32ChnId;
ctx->vi.stChnAttr.stIspOpt.u32BufCount = 2;
ctx->vi.stChnAttr.stIspOpt.enMemoryType = VI_V4L2_MEMORY_TYPE_DMABUF;
ctx->vi.stChnAttr.u32Depth = 1;
ctx->vi.stChnAttr.enPixelFormat = PixelFormat;
ctx->vi.stChnAttr.enCompressMode = CompressMode;
ctx->vi.stChnAttr.stFrameRate.s32SrcFrameRate = -1;
ctx->vi.stChnAttr.stFrameRate.s32DstFrameRate = -1;
ctx->vi.dstFilePath = pOutPath;
ctx->vi.s32loopCount = s32loopCnt;
}
SAMPLE_COMM_VI_CreateChn(&ctx->vi);
RK_MPI_VI_EnableChn(0, 1);
// init ivs
IVS_CHN_ATTR_S attr;
memset(&attr, 0, sizeof(attr));
// config ivs
{
attr.enMode = IVS_MODE_MD_OD;
attr.u32PicWidth = 640;
attr.u32PicHeight = 360;
attr.enPixelFormat = RK_FMT_YUV420SP;
attr.s32Gop = 60;
attr.bSmearEnable = RK_FALSE;
attr.bWeightpEnable = RK_FALSE;
attr.bMDEnable = RK_TRUE;
attr.s32MDInterval = 5;
attr.bMDNightMode = RK_FALSE;
attr.u32MDSensibility = 1;
attr.bODEnable = RK_TRUE;
attr.s32ODInterval = 1;
attr.s32ODPercent = 7;
}
RK_MPI_IVS_CreateChn(0, &attr);
IVS_MD_ATTR_S stMdAttr;
memset(&stMdAttr, 0, sizeof(stMdAttr));
s32Ret = RK_MPI_IVS_GetMdAttr(0, &stMdAttr);
if (s32Ret)
{
RK_LOGE("ivs get mdattr failed:%x", s32Ret);
while (1)
{
printf("ivs get mdattr failed:%x", s32Ret);
}
}
stMdAttr.s32ThreshSad = 400;
stMdAttr.s32ThreshMove = 2;
stMdAttr.s32SwitchSad = 0;
// update configuration
s32Ret = RK_MPI_IVS_SetMdAttr(0, &stMdAttr);
if (s32Ret)
{
while (1)
{
printf("ivs set mdattr failed:%x", s32Ret);
}
}
// bind vi and ivs
vi_chn.enModId = RK_ID_VI;
vi_chn.s32DevId = 0;
vi_chn.s32ChnId = 1;
ivs_chn.enModId = RK_ID_IVS;
ivs_chn.s32DevId = 0;
ivs_chn.s32ChnId = 0;
s32Ret = RK_MPI_SYS_Bind(&vi_chn, &ivs_chn);
if (s32Ret)
{
while (1)
{
printf("ivs set mdattr failed:%x", s32Ret);
}
}
IVS_RESULT_INFO_S stResults;
memset(&stResults, 0, sizeof(IVS_RESULT_INFO_S));
while (1)
{
s32Ret = RK_MPI_IVS_GetResults(0, &stResults, -1);
if (s32Ret == RK_SUCCESS)
{
if (stResults.s32ResultNum == 1)
{
printf("MD u32RectNum: %u\n", stResults.pstResults->stMdInfo.u32RectNum);
//for (int i = 0; i < stResults.pstResults->stMdInfo.u32RectNum; i++)
{
if (stResults.pstResults->stMdInfo.u32Square > md_area_threshold)
{
printf("MD: md_area is %d, md_area_threshold is %d\n",
stResults.pstResults->stMdInfo.u32Square, md_area_threshold);
/*printf("%d: [%d, %d, %d, %d]\n", i,
stResults.pstResults->stMdInfo.stRect[i].s32X,
stResults.pstResults->stMdInfo.stRect[i].s32Y,
stResults.pstResults->stMdInfo.stRect[i].u32Width,
stResults.pstResults->stMdInfo.stRect[i].u32Height);*/
}
}
}
RK_MPI_IVS_ReleaseResults(0, &stResults);
}
else
{
RK_LOGE("RK_MPI_IVS_GetResults fail %x", s32Ret);
}
}
// Destory Pool
RK_MPI_VI_DisableChn(0, 0);
RK_MPI_VI_DisableDev(0);
RK_MPI_IVS_DestroyChn(0);
SAMPLE_COMM_ISP_Stop(0);
RK_MPI_SYS_Exit();
return 0;
}
思路大概是这样,通道标签MPP_CHN_S和上下文_rkMpiCtx先准备好,启动isp(rkaiq),启动mpi,配置vi,创建vi通道,配置和创建ivs,配置运动检测的结构体,使用RK_MPI_IVS_SetMdAttr生效,再更新通道标签,对相应的通道进行绑定,最后一直获取结果,释放结果就ok。
cmake_minimum_required(VERSION 3.10)
# Configure the compiler
set(SDK_PATH $ENV{LUCKFOX_SDK_PATH})
if(NOT SDK_PATH)
message(FATAL_ERROR "Please Set Luckfox-pico SDK Path. Such as:export LUCKFOX_SDK_PATH=/home/user/luckfox-pico")
return()
endif()
set(CMAKE_C_COMPILER "${SDK_PATH}/tools/linux/toolchain/arm-rockchip830-linux-uclibcgnueabihf/bin/arm-rockchip830-linux-uclibcgnueabihf-gcc"
)
set(CMAKE_CXX_COMPILER "${SDK_PATH}/tools/linux/toolchain/arm-rockchip830-linux-uclibcgnueabihf/bin/arm-rockchip830-linux-uclibcgnueabihf-g++"
)
# Project Name
project("MyMD")
# Set the library directory
link_directories(${CMAKE_CURRENT_SOURCE_DIR}/lib)
set(CMAKE_INSTALL_RPATH "$ORIGIN/lib")
add_definitions(-DRV1106_1103)
#Thread
set(THREADS_PREFER_PTHREAD_FLAG ON)
find_package(Threads REQUIRED)
file(GLOB SRC_FILES "${CMAKE_CURRENT_SOURCE_DIR}/src/*.cc")
add_executable(${PROJECT_NAME} ${SRC_FILES})
add_compile_options(-g -Wall
-DISP_HW_V30 -DRKPLATFORM=ON -DARCH64=OFF
-DROCKIVA -DUAPI2
-D_LARGEFILE_SOURCE -D_LARGEFILE64_SOURCE -D_FILE_OFFSET_BITS=64
)
set(CMAKE_EXE_LINKER_FLAGS "${CMAKE_EXE_LINKER_FLAGS} -Wl,-rpath-link,${CMAKE_CURRENT_SOURCE_DIR}/lib:/usr/lib")
target_link_libraries(${PROJECT_NAME}
${LIBRKNNRT}
Threads::Threads
rockiva
sample_comm
rockit
rockchip_mpp
rkaiq
pthread
rtsp
)
target_include_directories(${PROJECT_NAME} PRIVATE
${OpenCV_INCLUDE_DIRS}
${CMAKE_CURRENT_SOURCE_DIR}
${CMAKE_CURRENT_SOURCE_DIR}/utils
${CMAKE_CURRENT_SOURCE_DIR}/3rdparty/rknpu2/include
${CMAKE_CURRENT_SOURCE_DIR}/common
${CMAKE_CURRENT_SOURCE_DIR}/common/isp3.x
${CMAKE_CURRENT_SOURCE_DIR}/include
${CMAKE_CURRENT_SOURCE_DIR}/include/rknn
${CMAKE_CURRENT_SOURCE_DIR}/include/rkaiq
${CMAKE_CURRENT_SOURCE_DIR}/include/rkaiq/uAPI2
${CMAKE_CURRENT_SOURCE_DIR}/include/rkaiq/common
${CMAKE_CURRENT_SOURCE_DIR}/include/rkaiq/xcore
${CMAKE_CURRENT_SOURCE_DIR}/include/rkaiq/algos
${CMAKE_CURRENT_SOURCE_DIR}/include/rkaiq/iq_parser
${CMAKE_CURRENT_SOURCE_DIR}/include/rkaiq/iq_parser_v2
${CMAKE_CURRENT_SOURCE_DIR}/include/rkaiq/smartIr
)
set(CMAKE_INSTALL_PREFIX "${CMAKE_CURRENT_SOURCE_DIR}/install/${PROJECT_NAME}_demo")
install(TARGETS ${PROJECT_NAME} DESTINATION ${CMAKE_INSTALL_PREFIX})
Views: 50